Ph. Credit: JustAndroid
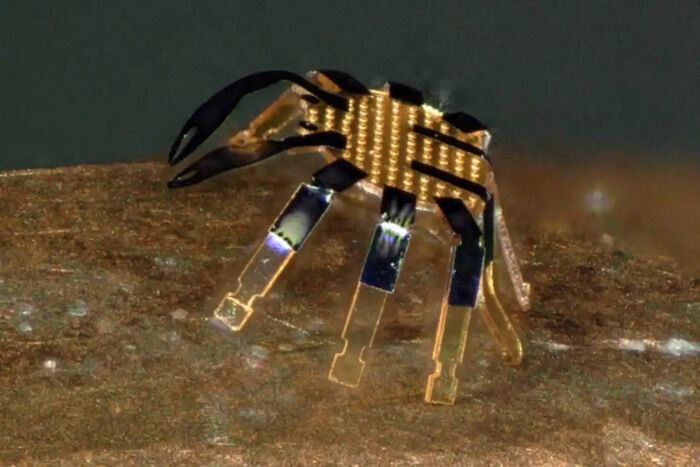
Gli ingegneri della Northwestern University sono riusciti a creare un robot piccolo quanto un penny a forma di granchio. Si tratta del primo robot ambulante telecomandato più piccolo al mondo e questi minuscoli granchi, a cui prendono la forma, sono in grado di piegarsi, torcersi, gattonare, camminare e persino saltare. Il team ha anche creato robot di dimensioni millimetriche che somigliano a scarafaggi, vermi e grilli.
Anche se la ricerca è solo alle prime fasi iniziali, si spera che questa tecnologia possa essere utile per avvicinarsi allo sviluppo di robot di piccole dimensioni, in grado di svolgere lavori pratici in luoghi ristretti. Il robot non è azionato da macchinari, impianti idraulici o elettrici. Il suo punto di forza è senza dubbio l’elasticità e la resilienza del corpo.
Per costruirlo i ricercatori hanno utilizzato un materiale di lega a memoria di forma, che una volta riscaldato si converte proprio nella forma ricordata. In questo caso hanno utilizzato un raggio laser a scansione per scaldare il robot in vari punti del corpo. Una volta raffreddato, un sottile strato di vetro riporta il componente deformato della struttura alla sua forma originale. Quando il calore veniva applicato più e più volte in una sequenza specifica, i granchi erano in grado di muoversi, in modo simile a come gli umani si piegano e raddrizzano le gambe per camminare.
La robotica è un campo di ricerca entusiasmante e lo sviluppo di robot su microscala è un argomento divertente per l’esplorazione accademica. Potremmo immaginare i micro-robot come agenti per riparare o assemblare piccole strutture o macchine nell’industria o come assistenti chirurgici per ripulire le arterie ostruite, per fermare l’emorragia interna o per eliminare i tumori, il tutto in procedure minimamente invasive e innovative. La tecnologia consente una varietà di modalità di movimento controllato e può camminare con una velocità media di metà della sua lunghezza corporea al secondo. Questo è molto difficile da raggiungere su scale così piccole per i robot terrestri.
La locomozione viene creata quando il robot passa da una fase all’altra: da una forma distorta a quella richiamata e viceversa. Il laser non solo attiva il robot a distanza, ma la direzione di scansione del laser determina anche la sua direzione di marcia. Proprio per fare ciò i ricercatori hanno creato antecedenti piatti e planari ai costrutti del granchio ambulante. Un processo di deformazione controllato si verifica quando il substrato teso viene allentato, provocando la comparsa del granchio in formazioni tridimensionali specificate con precisione.
Ph. Credit: JustAndroid
Il 30 giugno 1973 non fu un giorno qualunque per la scienza e per l’aviazione. Un Concorde, l’aereo simbolo della…
Nel mondo della produttività e della gratificazione immediata, si fa strada un concetto meno noto ma sempre più diffuso: il…
L'acufene è una condizione fastidiosa che attualmente, numeri probabilmente sottodimensionati per l'incapacità di fare diagnosi in certe parti del mondo,…
Samsung Electronics presenta la nuova generazione di Smart Monitor, guidata dal modello di punta M9 (M90SF), il primo della serie…
Bere fa male e ormai è un dato di fatto assodato. Non c'è discussione che tenga neanche sul discorso della…
Hai mai notato che dopo una notte agitata ti viene una fame da lupi? Non è un capriccio, né una…